Listopad 2023.
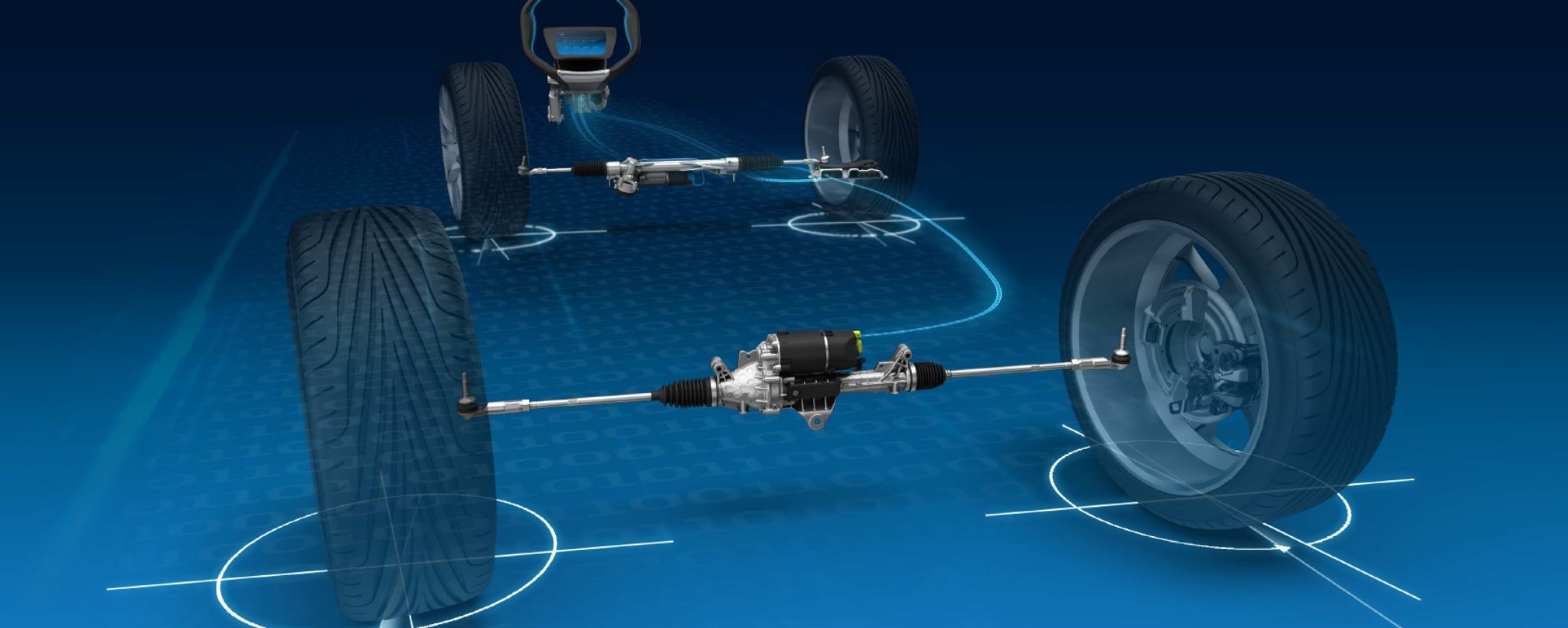
Fot. Układ kierowniczy steer-by-wire (Źródło: zf.com)
Steer-by-wire
Postęp w elektronice pozwolił na opracowanie wielu systemów wspomagających kierowcę.
W nowoczesnych samochodach pedały gazu, hamulca i sprzęgła są wykonane już bez cięgna Bowdena (linki), drążka czy hydraulicznego przenoszenia
siły. Magicznym słowem jest „X-by-Wire”, które oznacza sterowane elektronicznie.
Jednym z układów, w którym obecnie wprowadza się rozwiązania „by-Wire”, jest układ kierowniczy nazwany steer-by-wire.
Dopuszczenie do ruchu pojazdów z systemem ster-by-wire nie byłoby możliwe bez odpowiednich zmian przepisów homologacyjnych.
Regulamin nr 79
Regulamin nr 79 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) – Jednolite przepisy dotyczące homologacji pojazdów samochodowych w zakresie układów kierowniczych [2018/1947]
WPROWADZENIE (Wybrane)
Celem niniejszego regulaminu jest ustalenie jednolitych przepisów dotyczących konstrukcji i funkcjonowania układów kierowniczych stosowanych w
pojazdach przeznaczonych do użytkowania na drogach.
Do tej pory zgodnie z podstawowym kryterium główny układ kierowniczy musiał zawierać przymusowe połączenie mechaniczne pomiędzy kierownicą, czyli z reguły kołem kierowniczym, a kołami kierowanymi, w celu wyznaczenia toru ruchu pojazdu. Połączenie mechaniczne, pod warunkiem jego odpowiedniego zwymiarowania, uważano za praktycznie bezawaryjne.

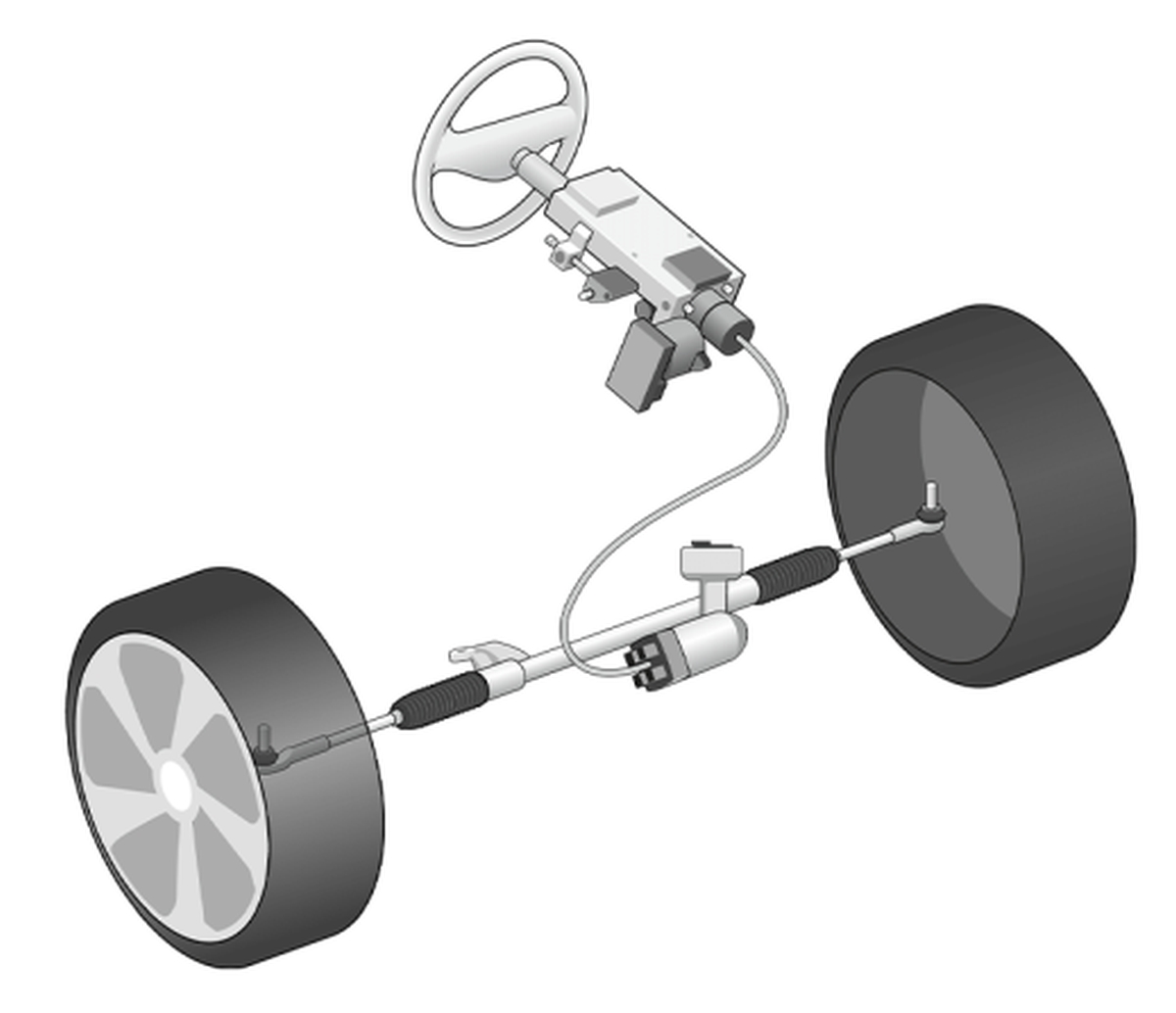
Fot. Tradycyjny układ kierowniczy.
Postęp techniczny, dążenie do poprawy bezpieczeństwa pasażerów poprzez wyeliminowanie mechanicznej kolumny kierownicy, a także korzyści
produkcyjne wynikające z łatwiejszego przekładania kierownicy w pojazdach z lewostronnym i prawostronnym układem kierowniczym doprowadziły do
zmiany tradycyjnego podejścia do układów kierowniczych.
W związku z tym do niniejszego regulaminu wprowadza się zmiany mające na celu uwzględnienie nowych technologii.
Dzięki temu możliwe będzie stosowanie układów kierowniczych niezawierających żadnego przymusowego połączenia mechanicznego pomiędzy kierownicą a kołami kierowanymi.
Rys. Układ kierowniczy steer-by-wire
Układy, w których kierowca sprawuje zasadniczą kontrolę nad pojazdem, lecz może być wspomagany poprzez reakcję układu kierowniczego na sygnały pochodzące z pojazdu, określa się jako „zaawansowane układy kierownicze ze wspomaganiem kierowcy”.
Układy takie mogą zawierać „funkcję automatycznie kontrolowanego kierowania” wykorzystującą, na przykład, elementy infrastruktury biernej do utrzymywania pojazdu na idealnym torze ruchu (funkcja prowadzenia po właściwym pasie, funkcja utrzymania pasa ruchu lub kontrola zadanego kursu), wspomagania kierowcy w manewrowaniu z niewielką prędkością na ograniczonej przestrzeni lub wspomagania kierowcy w zatrzymaniu w określonym miejscu (układ zatrzymania na przystanku autobusowym).
Zaawansowane układy kierownicze ze wspomaganiem kierowcy mogą również zawierać „korekcyjną funkcję kierowniczą”, która, na przykład, ostrzega kierowcę przed opuszczeniem wybranego pasa ruchu (ostrzeżenie przed opuszczeniem pasa ruchu), koryguje kąt skrętu koła, aby zapobiec opuszczeniu zadanego pasa ruchu (układ przeciwdziałający opuszczeniu pasa ruchu) lub koryguje kąt skrętu jednego koła lub większej liczby kół w celu poprawy dynamiki lub stabilności pojazdu.
W przypadku wszystkich zaawansowanych układów kierowniczych ze wspomaganiem kierowcy kierowca może w każdej chwili dokonać neutralizacji funkcji wspomagania poprzez umyślne działanie, na przykład w celu ominięcia niespodziewanej przeszkody na drodze.
Przewiduje się, że w technologii przyszłości układ kierowniczy będzie reagować również na oddziaływanie lub sterowanie ze strony czujników i sygnałów pochodzących z wnętrza pojazdu albo ze źródeł zewnętrznych. Spowodowało to powstanie szeregu wątpliwości dotyczących odpowiedzialności za zasadniczą kontrolę nad pojazdem oraz braku międzynarodowych protokołów transmisji danych w zakresie sterowania układem kierowniczym spoza pojazdu lub zewnętrznie.
Z tego względu w niniejszym regulaminie nie zezwala się na ogólną homologację układów zawierających funkcje umożliwiające sterowanie układem kierowniczym za pomocą sygnałów zewnętrznych, na przykład sygnałów pochodzących z nadajników przydrożnych lub elementów aktywnych wbudowanych w nawierzchnię drogi.
Tego typu układy, które nie wymagają obecności kierowcy, zdefiniowano jako „niezależne układy kierownicze”.
W niniejszym regulaminie nie zezwala się również na homologację przymusowego kierowania przyczepami za pomocą sterowania elektrycznego z pojazdu ciągnącego, ponieważ obecnie brak jest jakichkolwiek norm regulujących kwestie związane z tego rodzaju zastosowaniami. Oczekuje się, że w przyszłości norma ISO 11992 zostanie odpowiednio zmieniona w celu uwzględnienia komunikatów powiązanych z transmisją danych w zakresie sterowania układem kierowniczym.
Norma ISO 11992 to oparty na CAN standard połączenia zespołu pojazdów. Służy do komunikacji między ciągnikiem a jedną lub kilkoma przyczepami. Jej pełny tytuł to „Pojazdy drogowe – wymiana informacji cyfrowych na temat połączeń elektrycznych między pojazdami ciągnącymi i ciągniętymi”.
DEFINICJE (Wybrane)
2.3. „układ kierowniczy” oznacza kompletny układ, którego funkcją jest wyznaczenie kierunku ruchu pojazdu.
Układ kierowniczy składa się z następujących elementów:
- kierownicy,
- przekładni kierowniczej,
- kół kierowanych,
- w stosownych przypadkach układu zasilania w energię;
2.3.1. „kierownica” oznacza tę część układu kierowniczego, która steruje jego działaniem; może być ona obsługiwana przy bezpośrednim udziale kierowcy lub bez takiego udziału.
W przypadku układu kierowniczego, w którym siły kierujące pochodzą całkowicie lub częściowo z siły mięśni kierowcy, w skład kierownicy wchodzą wszystkie części tego układu, aż do punktu, w którym siła kierowania ulega mechanicznemu, hydraulicznemu lub elektrycznemu przekształceniu;
2.3.2. „przekładnia kierownicza” oznacza wszystkie elementy stanowiące funkcjonalne połączenie pomiędzy kierownicą a kołami kierowanymi.
Przekładnia składa się z dwóch niezależnych układów:
- układu przełożenia sterowania i układu przełożenia siłowego.
Jeżeli w treści niniejszego regulaminu występuje tylko słowo „przekładnia”, obejmuje ono układ przełożenia sterowania i układ przełożenia siłowego łącznie.
Rozróżnia się przekładnie mechaniczne, elektryczne, hydrauliczne lub ich połączenia, w zależności od sposobu przenoszenia sygnałów lub energii;
2.3.2.1. „układ przełożenia sterowania” oznacza wszystkie elementy, za pośrednictwem których przenosi się sygnały służące do sterowania układem kierowniczym;
2.3.2.2. „układ przełożenia siłowego” oznacza wszystkie elementy, za pośrednictwem których przenosi się energię niezbędną do sterowania funkcją kierowniczą kół/regulacji tej funkcji;
2.3.4. „zaawansowany układ kierowniczy ze wspomaganiem kierowcy” oznacza układ dodatkowy w stosunku do
głównego układu kierowniczego, który zapewnia wspomaganie kierowcy w kierowaniu pojazdem, ale
w którym kierowca zawsze sprawuje zasadniczą kontrolę nad pojazdem.
Układ ten składa się z przynajmniej jednej z dwóch poniższych funkcji:
2.3.4.1. „funkcja automatycznie kontrolowanego kierowania (ACSF)” oznacza funkcję wchodzącą w skład układu sterowania elektronicznego, dzięki której układ kierowniczy może zostać uruchomiony na skutek automatycznej oceny sygnałów pochodzących z pojazdu, ewentualnie w połączeniu z elementami infrastruktury biernej, w celu wytworzenia regulacji służącej do wspomagania kierowcy;
2.3.4.1.1. „ACSF kategorii A” oznacza funkcję działającą przy prędkości nieprzekraczającej 10 km/h, która wspomaga kierowcę – na jego żądanie – w trakcie manewrowania z małą prędkością lub w trakcie manewru parkowania;
2.3.4.1.2. „ACSF kategorii B1” oznacza funkcję wspomagającą kierowcę w utrzymaniu pojazdu na wybranym pasie ruchu poprzez korygowanie ruchu poprzecznego pojazdu;
W regulaminie 79 zdefiniowano więcej kategorii funkcji wspomagających kierowcę (Regulamin nr 79).
Jak działa układ kierowniczy steer-by-wire.
Technologia steer-by-wire zastępuje tradycyjne mechaniczne połączenie pomiędzy kierownicą a kołami połączeniem elektrycznym.
- Ruch kierownicy jest wykrywany przez siłownik momentu obrotowego układu kierowniczego umieszczony na końcu kolumny kierownicy.
- Informacje są przesyłane do siłownika sterowania układem kierowniczym, który przetwarza je na ruch mechaniczny zębatki przekładni kierowniczej.
- Dodatkowe dane o nawierzchni są zbierane z opon i przekazywane do siłownika sterującego w celu dalszego usprawnienia i modyfikacji jego reakcji.
Film 1. Steer-by-wire (Źródło: youtube.com)
Jakie są korzyści wdrożenia technologii steer-by-wire
Znaczący wpływ na ograniczenie wypadków drogowych (brak kolumny kierowniczej oznacza brak przenoszenia przez nią siły uderzenia)

Fot. Test samochodu Tesla Model S (Źródło: euroncap.com)
Ułatwianie prowadzenia pojazdów (niezależne kierowanie kołami przedniej i tylnej osi)

Fot. Układ kierowniczy steer-by-wire (Źródło: zf.com)
Swoboda w projektowaniu pojazdów (np. jeden wariant dla pojazdów różnej wielkości, jeden wariant dla ruchu prawo – lewostronnego – dzięki przekładanej kierownicy i elektrycznym pedałom)
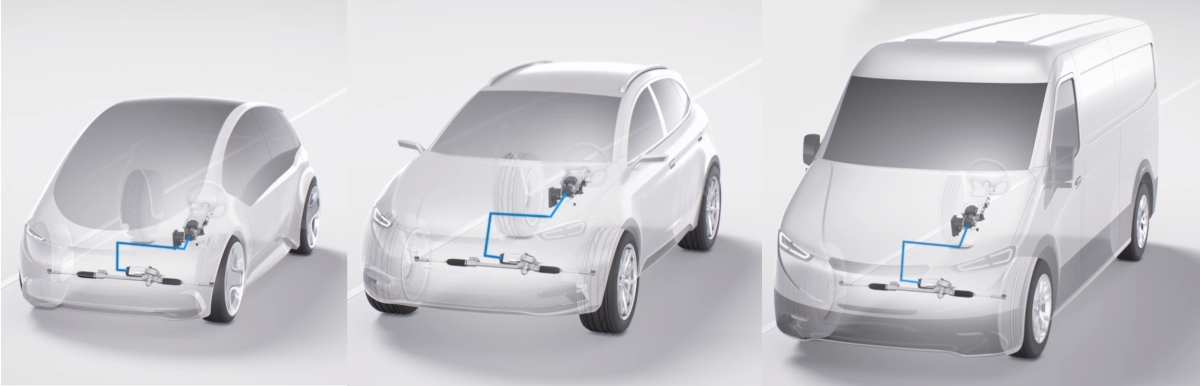
Fot. Technologia Steer-by-wire (Źródło: bosch-mobility.com)
Przykłady.
Lexus RZ 450e
W nowym w pełni elektrycznym Lexusie zastosowano elektryczny układ kierowniczy ze zmiennym przełożeniem Lexus One Motion Grip w technologii steer-by-wire (dostępny od roku 2025).
Przełożenie przekładni kierowniczej można zoptymalizować w celu dostosowania do prędkości pojazdu: niższe do manewrów przy małych prędkościach lub większe do jazdy ze średnimi i dużymi prędkościami.
One Motion Grip został dostrojony tak, aby wymagał obrotu kierownicą o zaledwie 150 stopni od jazdy na wprost do pełnego skrętu.
Film 2. Lexus RZ 450e Steer-by-wire (Źródło: mag.lexus.co.uk)
Steer by wire Nexteer
Nexteer to producent podzespołów motoryzacyjnych dostarczający elektryczne i hydrauliczne układy wspomagania kierownicy.
Steer by wire jest kluczowym czynnikiem umożliwiającym korzystanie z funkcji wspomaganej i zautomatyzowanej jazdy, które będą dostępne w pojazdach elektrycznych dziś i w przyszłości. Steer by wire wykorzystuje zaawansowane oprogramowanie sterujące, aby zapewnić podstawę dla innych technologii wspomagających ADAS i AD, takich jak chowane kolumny kierownicy, systemy sterowania Quiet Wheel™ i Steering on Demand™, a także umożliwia zaawansowane rozwiązania w zakresie bezpieczeństwa cybernetycznego i łączności.
ADAS (Systemy wspomagania prowadzenia - Advanced Driver Assistance Systems)
AD (Jazda autonomiczna - Autonomous driving)